
仿生水下机器人项目
仿生机器人
我们正在开发基于动物模型的神经生理学和行为的神经技术。我们开发了两类仿生自主水下航行器(见上文)。第一种是基于龙虾的8条腿的移动式机器人,用于河流和/或沿海地区海底的自主遥感作业,对不规则的底部轮廓、水流和涌浪具有强大的适应性。第二种飞行器是基于七鳃鳗的波动系统,用于水柱遥感作业,具有可靠的深度/高度控制和高机动性。这些车辆基于通用的仿生控制、执行器和传感器架构,具有高度模块化的组件和低成本的每辆车。它们协同工作,可以对沿海地区或河流的底部和水柱进行自主调查。这些系统代表了一类新的自主水下航行器,可以适应在各种栖息地作业
![]()
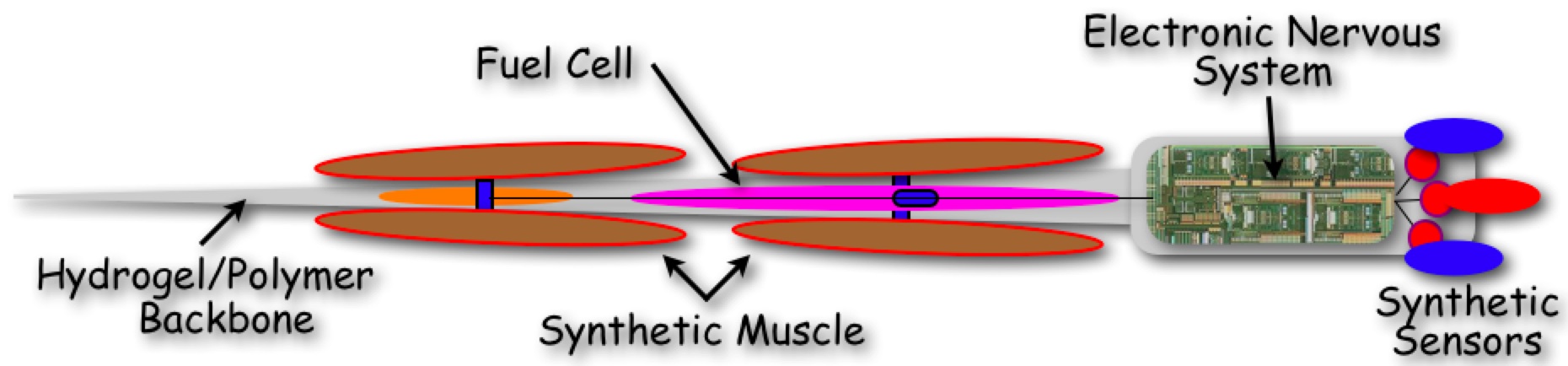
Cyberplasm我们正在与调查人员合作加州大学,阿拉巴马大学而且纽卡斯尔大学将合成生物学原理应用于混合微型机器人的集成。本研究的目的是构建Cyberplasm这是一种微型机器人,集成了微电子和细胞,其中插入并表达了传感器和执行器基因。这将通过结合蜂窝设备集成、先进微电子学和仿生学来实现;模仿动物模型的方法;在后者中,我们将模仿海洋动物——海七鳃鳗的一些行为。人造肌肉会产生波动运动,推动机器人在水中前进。来自酵母细胞的合成传感器将报告来自直接环境的信号。这些信号将被电子神经系统处理。反过来,电子大脑将产生信号来驱动肌肉细胞,这些肌肉细胞将葡萄糖作为能量。所有电子元件将由集成在机器人体内的微生物燃料电池供电。
该研究旨在通过整合特定基因,在细胞水平上利用合成生物学的力量部分
进入细菌,酵母和哺乳动物细胞来执行类似装置的功能。此外,这种方法将允许细胞/细菌简化
这样可以解决设备集成的输入/输出(I/O)需求。特别是,我们计划使用视觉感受器通过光信号将电子设备与感觉和驱动结合起来。此外,合成生物学将在系统层面上进行,将多个细胞/细菌设备连接在一起,连接到一个电子大脑,实际上创建了一个多细胞生物杂交微型机器人。运动功能将通过改造肌肉细胞来实现,使其具有兴奋/收缩耦合和收缩功能所需的最小细胞机械。肌肉将由线粒体将葡萄糖转化为ATP提供动力,ATP是生物细胞中的能量货币,因此将发电与驱动结合起来。
.
电子神经系统我们还在为机器人和神经康复设备开发基于神经元电路的控制器。这些控制器是基于
实验室成员
|
来访的科学家 艾尔·塞尔弗斯顿,海洋科学中心
Jan Witting,海洋教育协会
研究生 Ben Doyle,东雷竞技app最新版raybet雷竞技北大学
Andy Kong,东雷竞技app最新版raybet雷竞技北大学
劳拉·麦格拉斯,巴克内尔大学
莱恩·迈尔斯,东北大学raybet雷竞技雷竞技app最新版
林竹,南京大学
实习生 安妮Nunter
约翰•阮
娜塔莉Kukshtel
|
书
仿生机器人神经技术
游泳和飞行的生物力学
新闻
艾尔斯机器人实验室的Quicktime VR视图
仿生系统在线动画
相关链接
相关的出版物
- 艾尔斯,j,还有克里斯曼。(1992)龙虾作为全方位机器人移动控制结构的模型。见:无脊椎动物神经行为学和机器人中的生物神经网络。, R.比尔。李志刚,李志刚,李志刚[编],287-316。
- Ayers, J.(1992)用于科学图像分析的桌面运动视频。高级影像7:52 -55。
- Ayers, J.和Crisman, J.(1992)基于生物的全向腿部协调控制,IEEE智能机器人与系统研究1:574-581
- Ayers, J., Crisman, J. D.和Massa, D.(1993)水下行走机器人的基于生物的控制器。Proc, Int。计算机协会。无人潜水技术。自主海底系统研究所,朴茨茅斯,新罕布什尔州,第60-68页
- Ayers, J., Kashin, S., Blidberg, D. R. and Massa, D.(1994)生物水下机器人。无人系统12:30-36。
- Chappell, S和Ayers, J.(1995)固有和调制自主水下航行器行为。In: Proc. Int。计算机协会。无人潜水技术。自主海底系统研究所,朴茨茅斯,新罕布什尔州,第376-387页。
- Jalbert, J. Kashin, S. Ayers, J.(1995)一种基于生物的波动七鳃鳗样AUV。见:自动驾驶车辆在地雷对策研讨会。海军研究生院。一则页。
- Jalbert, J. Kashin, S. Ayers, J.(1995)基于生物的波动七鳃鳗状AUV的设计考虑和实验。In: Proc. Int。计算机协会。无人潜水技术。自主海底系统研究所,朴茨茅斯,新罕布什尔州,第124-138页
- Ayers, J.(1995)一种用于电流和浪涌操作的反应式移动机器人结构。见:自动驾驶车辆在地雷对策研讨会。海军研究生院。Breithaupt, T.和Ayers, J.(1995)水下生物流场的悬浮颗粒可视化和定量分析。《海洋行为与生理学》,出版中
- Breithaupt, T.和Ayers, J.(1996)利用悬浮粒子对水下生物流场进行可视化和定量分析。收录:浮游动物:感觉生态学和生理学。李志刚,李志刚,李志刚[编辑]。巴塞尔:Gordon和Breach科学出版社。第117-129页
- Breithaupt, T., Ayers, J.(1998)通过基于视频的数字运动分析技术可视化和定量生物流场。3月新鲜。Behav。杂志。第31卷,55-61页。
- 艾尔斯,J,扎夫拉基,P,麦克格鲁尔,N,马萨。D., Vorus, W., Mukherjee, R.和Currie, S.(1998)一种基于模块化行为的仿生自主水下机器人架构。见:第三届技术与地雷问题国际会议纪要。海军研究生院。光盘。
- Ayers, J.(1999)一种基于行为的仿生水下机器人控制器架构。在:前国家智能:适应性行为和智能系统没有符号和逻辑。卷i.h. Cruse, H. Ritter和J. Dean [eds] Kluwer Acad. Pub。多德雷赫特。357 - 370页。
- Ayers, J., J. Witting, C. Wilbur P. Zavracky, N. McGruer和D. Massa(2000)浅水水雷对抗的仿生机器人。第四届国际技术与矿山问题会议论文集,16页,光盘。
- 艾尔斯,J.,威廷,J.,麦克格鲁尔,N.,奥尔科特,C.,马萨,D.(2000)龙虾机器人。见:水生物力学国际研讨会论文集。吴涛,加藤。[编辑]。东海大学。
- 艾尔斯,J.,威尔伯,C.,奥尔科特,C.(2000)七鳃鳗机器人。见:水生物力学国际研讨会论文集。吴涛,加藤。[编辑]。东海大学。
- Ayers, J.(2000)水下机器人行为的有限状态分析和发展。《人工动物行为学》,D. MacFarland和O. Holland[编辑]。在出版社。
- 威特,J., J.艾尔斯等人(2000)。仿生水下行走机器人的研制:仿生控制结构与仿生执行器匹配的优点。机器人系统中的传感器融合与分散控制3。麦基,申克。4196:54-61。
- Ayers, J.(2001)自主水下机器人的保守仿生控制体系结构。在:神经技术的仿生机器人,。李志刚,李志刚,李志刚[编辑]。麻省理工学院出版社,
- McGruer, N., T. Truong, T. Barnes, X. Lu,和J. Aceros(2001)仿生流动和接触/弯曲MEMs传感器。在:神经技术的仿生机器人,。李志刚,李志刚,李志刚[编辑]。麻省理工学院出版社
- Witting, J.和K. Safak(2001) SMA致动器应用于仿生水下机器人,在:仿生机器人的神经技术,。李志刚,李志刚,李志刚[编辑]。麻省理工学院出版社。
- 威尔伯,C., W. Vorus, Y. Cao和S. Currie(2001)一种基于七鳃鳗的波动载体。在:神经技术的仿生机器人,。李志刚,李志刚,李志刚[编辑]。麻省理工学院出版社。
- Ayers, J., a . Volkovski, N. Rukov, a . Selverston, & H.D.I. Abarbanel, m.r. 2003使用电子神经元为龙虾机器人构建大脑。在非线性波物理国际会议,第3页下诺夫哥拉德,俄罗斯。
- 艾尔斯,J.(2004)。仿生水下机器人自适应行为的体系结构。游泳和飞行的生物机制。N. Kato, Ayers, J., Morikawa, H. Tokyo, Springer-Verlag: 171-187。
- 李永杰,李永杰。, Y.B. Kim, J. Ayers, A. Volkovskii, A. Selverston, H. Abarbanel, M. Rabinovich(2004)。使用亚阈值技术的低功耗实时电子神经元VLSI设计IEEE电路与系统4:744-747。
- 艾尔斯,J.(2004)水下行走。节肢动物结构与发育33,347-360。
- Selverston, A. I, Rabinovich, M. I, Huerta, R., Novotny, T., Levi, R., Arshavsky, Y., Volkovskii, A., Ayers, J. & Pinto, R.(2005)用于机器人和义肢的仿生中心模式生成器。在ROBIO2004, IEEE国际机器人与仿生学会议,1:885 - 888。中国沈阳。
- 艾尔斯,J.和戴维斯,J.(2005)仿生机器人。武器系统技术信息分析中心通讯5(4):1-4。
- 艾尔斯,J.和戴维斯,J.(2005)龙虾机器人。武器系统技术信息分析中心通讯6(1):1-5
- 艾尔斯,J., N.鲁科夫等(2006)。电子神经元:从仿生机器人到神经康复。第七届技术与地雷问题国际会议,蒙特利,加州。
- Selverston, A. & Ayers, J.(2006)小型神经电路中的振荡和振荡行为。生物控制论95:537�554
- Ayers, J.和Witting, J.(2007)控制水下行走机器的仿生方法。《皇家学会哲学汇刊》,A, 365, 273 - 295
- 李,Y . .李,金,杨,艾尔斯,(2005)。低功耗CMOS自适应电子中央图案发生器设计。IEEE电路与系统2:1350-1353
- J. Lee, Y. J. Lee, K. Kim, Y. B. Kim, J. Ayers (2007)“低功耗CMOS自适应电子中心模式发生器设计的仿生机器人”,神经计算71:284-296.
- 艾尔斯,J.和N.鲁科夫(2007)。电子神经系统控制水下仿生机器人。在:生物机制的动物在游泳和飞行。N.加藤和S.神村。东京,气象出版社。295 - 306页。
- 艾尔斯,J.,鲁尔科夫,N.,克努森,D.,金,Y-B.。,沃尔科夫斯基,A.塞尔维斯顿,A.(2010)。"用电子神经系统控制水下机器人"应用仿生学与生物力学7:57 -67。
- Blustein, D.和J. Ayers,(2010)节肢动物运动过程中外感光流反射控制的保守网络。人工智能课堂笔记,6226:72-81
- 胡俊,YB。Kim J. Ayers(2010)用于生物传感应用的低功率100M CMOS前端跨阻放大器。IEEE电路与系统。53:541 - 544
- 韦斯特法尔,A.,鲁尔科夫,N.,艾尔斯,J.,布雷迪,D.和亨特,M. 2011。用电子神经系统控制基于七鳃鳗的机器人。智能结构与系统,7(6):471 - 484
- . ayers, J, Westphal, A. & Blustein, D.(2011)一种基于保守神经电路的动态和波动仿生机器人架构。海洋技术学报45(4):147-152。
支持的
 (页面最后更改9/20/2010) (页面最后更改9/20/2010) |
 |







 (页面最后更改9/20/2010)
(页面最后更改9/20/2010)