东北的体验机器人研究所
将人类经验整合到自主和机器人系统的设计和开发中,以确保无缝协作

关于研究所
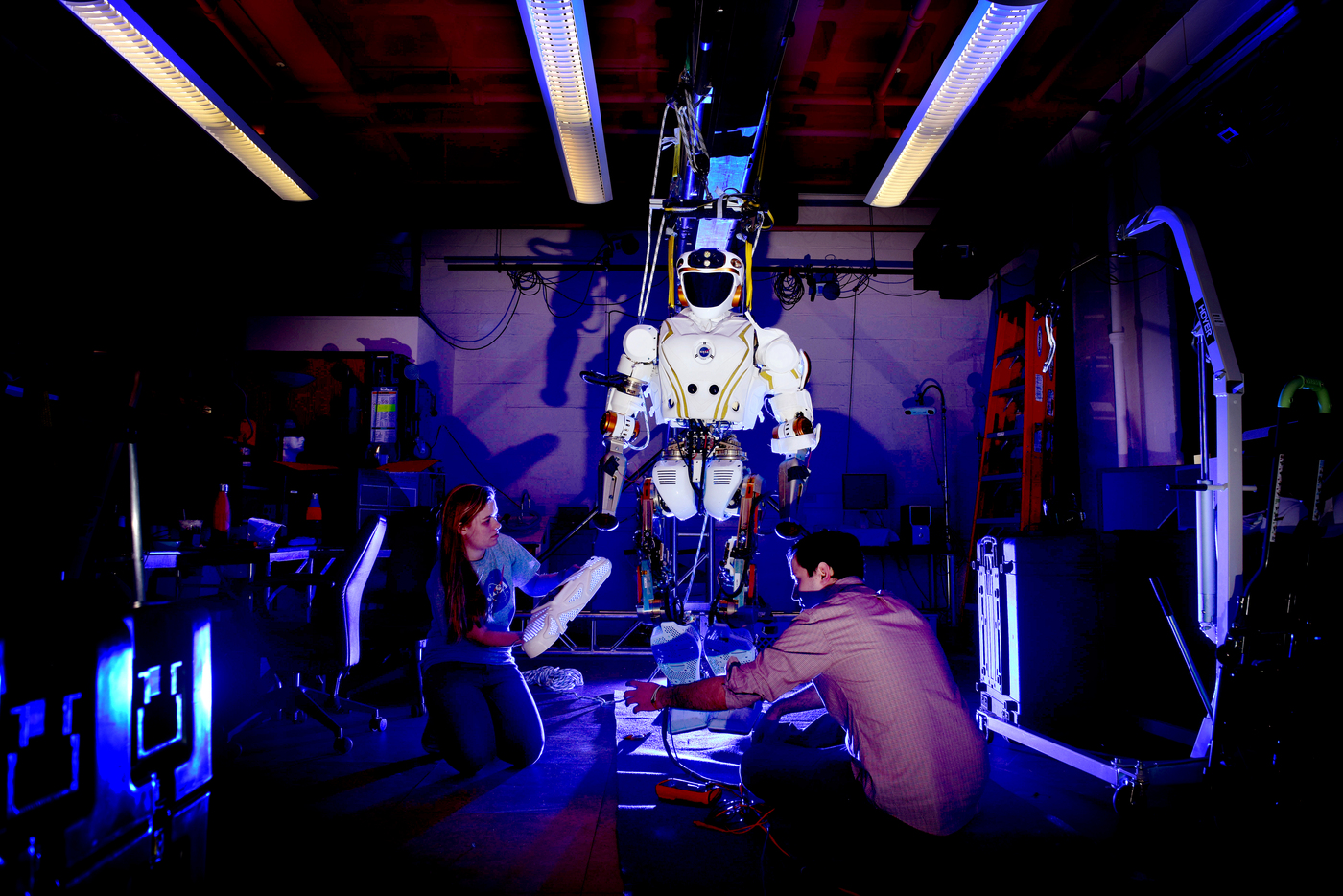
体验式机器人专注于开发能够学习和自适应执行人类伙伴和/或其他机器人的自主行为的机器人。体验式机器人识别和研究使用驱动的研究问题,在集体人-机器人经验的交叉点,包括:
- 操作安全可靠工具和物品
- 机器学习灵巧地操作新奇的物体
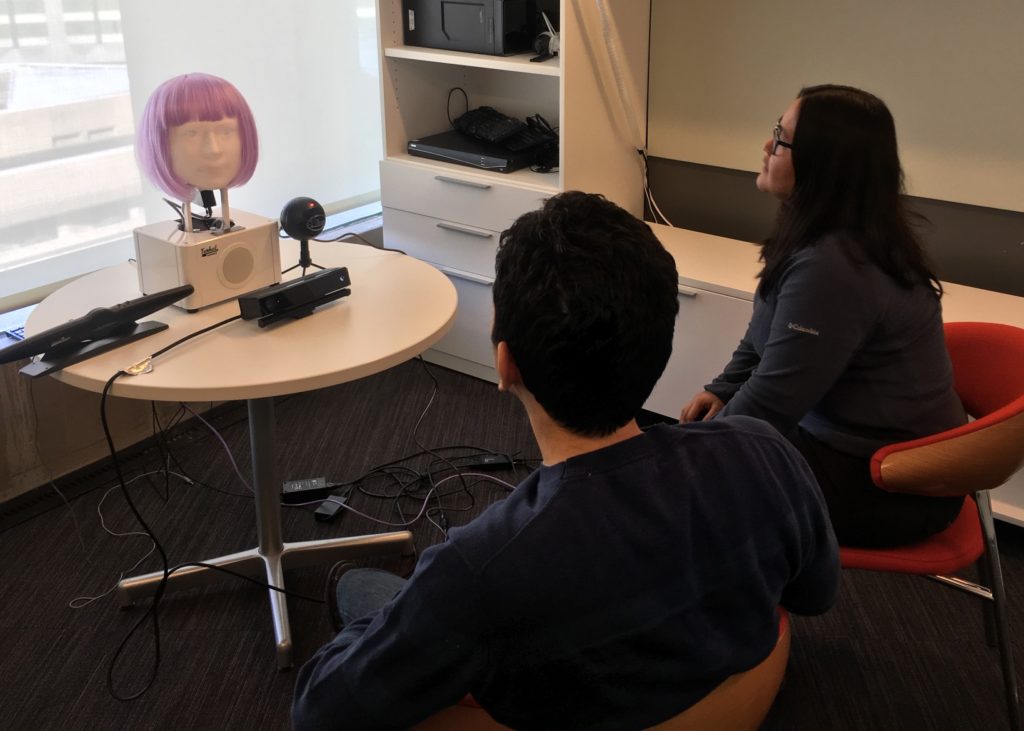
- 两国学习在人机交互
- 健壮的人类意图推断
- 深入了解人体运动
- 安全且有弹性自治系统
- 个性化的人机协作
- 自主机器人的伦理学为了支持人类
- 自适应机器人导航在人类环境中
- 协作机器人的社会经济影响关于人类工作
体验式机器人解决了这些跨学科的研究问题,以提高自主机器人与人类合作执行日常任务的能力。
在广泛的人类环境中广泛采用自主机器人依赖于强大的机器人性能和机器人适应日常人类经验、安全协议、人类舒适度和社会因素中固有的不确定性的能力。
IER研究被组织成五个目标:
- 人与机器人合作
- 具身人工智能
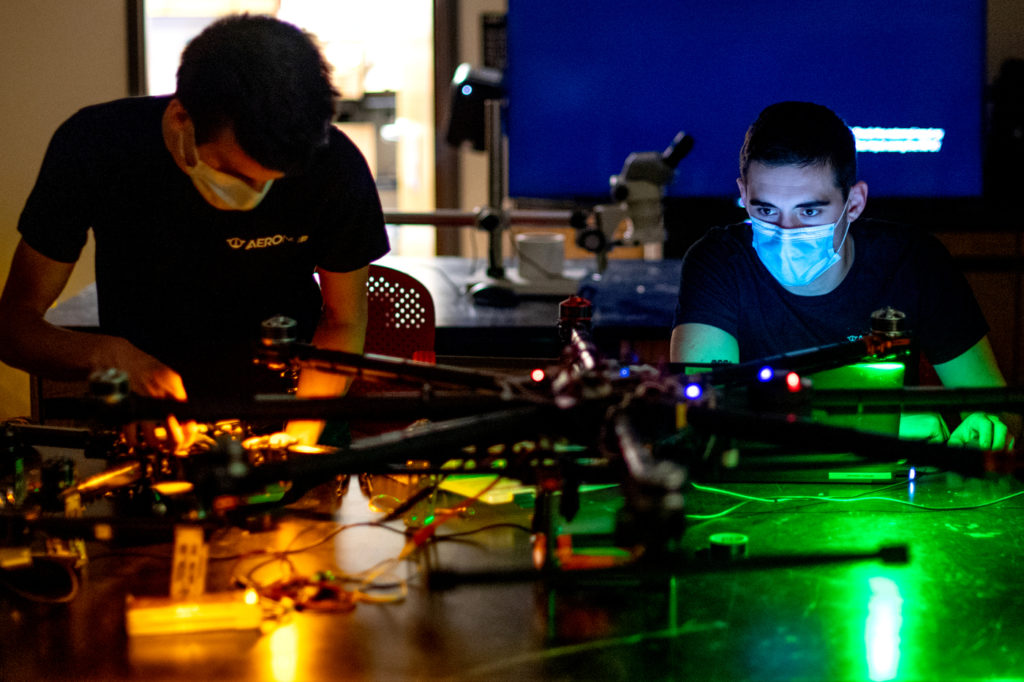
- 系统、设计和控制
- 伦理和政策,经济学和全球框架
- 安全和隐私保护机器人
跨学科的IER团队与我们的合作伙伴合作,致力于许多应用于健康、可持续发展、安全、制造和未来工作的项目。

在体验式机器人研究所,我们设想如下四种元素作为我们的指导原则。
- 测量、验证和改进人-机器人体验
- 能够学习人类经验的机器人
- 可以互相学习的机器人
- 应用于现实问题和人类经验